Load cells,Force sensors,Torque transducers
Load cells,Force sensors,Torque transducers
 |
| Place of Origin: | China |
| Brand Name: | Forsentek |
| Certification: | CE |
| Model Number: | FY02 |
| Minimum Order Quantity: | 1pc |
|---|---|
| Packaging Details: | Shockproof packing |
| Delivery Time: | 3-12 working days |
| Payment Terms: | Western Union, T/T,Paypal, MoneyGram |
| Supply Ability: | 900pcs/month |
| Principle: | Slip-ring Rotary Torque Meter | Capacity: | 0.1NM 0.2NM 0.3NM 0.5NM 1NM 2NM 3NM 5NM |
|---|---|---|---|
| Output: | Analog | Type: | Rotating Type |
| Connection: | Shaft-to-shaft |
Shaft Type Dynamic Torque Meter 0-5Nm Rotary Torque Sensor With Indicator
Shaft Style Rotary Torque Meter FY02 is a slip-ring type torque transducer intended for rotating torque measurement in both clockwise and anticlockwise direction,slip rings are used to conduct the millivolt signal from the wheatstone bridge bonded on the sensing shaft which rotates together with motor shaft and gets the torque measured with maximum 0.2% non-linearity of the full capacity. Dynamic torque meter FY02 offers 0.1NM / 0.2NM / 0.5NM / 1NM / 2NM / 3NM / 5NM seven rated capacities to choose from. Keyed shafts located on both ends of the sensor can be connected to motor shaft and load shaft through couplings. Rotating speed of model FY02 goes up to 4000RPM, signal conditioner and display unit is also available at Forsentek. Typical applications for this type of torque cell are for example servo motor torque measurement, torque control for blenders, test bench applications, screw driver calibration, actuator test,etc..
![]()
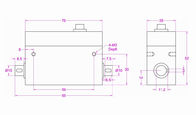
Dimensions
![]()
| Ordering code | Torque Range | Torque measure direction |
| FY02-0.1NM | 0~0.1N*m |
Clockwise & Anticlockwise |
| FY02-0.2NM | 0~0.2N*m | |
| FY02-0.5NM | 0~0.5N*m | |
| FY02-1NM | 0~1N-m | |
| FY02-2NM | 0~2N*m | |
| FY02-3NM | 0~3N*m | |
| FY02-5NM | 0~5N-m |
Specifications
| Rated capacity |
0.1Nm / 0.88lbf*in / 1kg*cm 0.2N*m / 1.77lbf-in / 2kg*cm 0.5N-m / 4.43lbf*in / 5kg-cm 1N*m/ 8.85lb-in / 10kg-cm 2N*m / 17.7lb*in / 20kg*cm 3Nm / 26.5lb*in / 30kg*cm 5Nm / 44.3 lb-in / 50kg*cm |
||
| Rated output | 1.0 mV/V | Compensated temperature | -10...+40oC |
| Excitation | 3-15V | Operating temperature | -20...+60oC |
| Zero balance | ±0.05mV/V | Temperature shift zero | ±0.02% R.O./oC |
| Nonlinearity | ±0.2% R.O. | Temperature shift span | ±0.02% R.O./oC |
| Hysteresis | ±0.2% R.O. | Input resistance | 380±30 ohms |
| Nonrepeatability | ±0.1% R.O. | Output resistance | 350±5 ohms |
| Creep(10min) | ±0.1% R.O. | Insulation resistance | >2000M ohms |
| Safe overload | 150% F.S. | Ingress protection | IP40 |
| Ultimate overload | 200% F.S. | Material of element | Stainless steel |
| Cable | Ø5*3000mm 4-core shielded (Mating connector included) | ||
| Wiring code |
Clockwise@ Red--Excitation+ Black--Excitation- Green--Signal+ White--Signal- |
||
A torque sensor is a transducer that converts mechanical torque into mV signal proportional to the applied torque.The acting torsion causes deformation of the measuring element,the bonded strain gage deforms accordingly which will cause the resistance change of the wheatstone bridge,under constant power supply, the output signal between Sig+ and Sig- will change proportionally,thus the moment can be measured by measuring the output signal from the transducer.
Torque sensor output: = (Power supply * Rated output) * Load / Capacity
Rated output is normally within 1mV/V~3mV/V.
Power supply is normally within 3-15V.
Load / Capacity is within 0-1.
So the torque sensor output signal is normally within 0-45mV(-45mV...+45mV for bidirectional load cell).
Example one: FY02-0.5NM with 1.0mV/V rated output powered by 10V DC,the output range is -10mV...+10mV.
Example two: FY02-0.1NM with 1.0mV/V rated output powered by 3.3V DC,the output range is -3.3mV...+3.3mV.
Torque sensor + Signal amplifier to deliver -5-5V 0-10V 4-20mA output.
Example: FY02-2NM working with -10-10V amplifier,the torque-output relationship will be 0-2Nm torque in CW direction VS 0-10V output,0-2Nm torque in CCW direction VS 0-(-10V) output,which is linear within the error range.
Torque cell + Digital indicator:
-Display torque value in real time
-Peak holding to grab the maximum force during testing
-RS485 or RS232 interface
-0-5V/0-10V/4-20mA analog output
-Switch output
![]()
Multi axis load cell 1kg 2kg 5kg 10kg 3-axis force measurement transducer
Triaxial force sensor 1kN 500N 300N 200N 100N 3-axis load cell
3 axis load cell 200kN 100kN 50kN 20kN 10kN 5kN 2kN 1kN Triaxial force sensor
Triaxial load cell 1000kg 500kg 200kg 100kg Triaxial force sensor
Miniature rotary torque sensor 1NM 2NM 3NM 5NM rotating torque measurement
Rotary torque sensor 10NM 20NM 50NM 100NM 200NM 300NM 500NM torque transducer
Contactless rotating type torque speed sensor measuring motor torque
Micro force sensor 50N 100N 200N 500N Micro loadcell sensor
10KG miniature load cell sensor 5kg small size weight transducer 2kg
Miniature force transducer 0-1000N miniature force sensor 0-220 lbs
Miniature force transducer 50N 100N 200N 500N 1kN 2kN force measurement